
Max the Robot Update and Computational Thinking
Since the October half term we have returned repeatedly to Computational Thinking as an ongoing topic, using computational concepts and approaches to solve problems. We’ve thought about the different concepts and approaches using several pieces of equipment:
1. Dash the robot allows the use of block coding to solve a wide variety of problems. We’ve used Dash in maths to plot shapes, and to solve challenges such as navigating from point A to point B within the classroom.

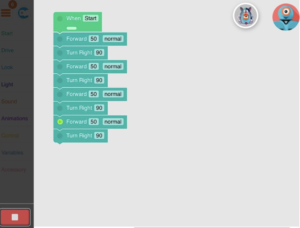
2. Our BBC Microbit computer also require block coding. Using the wide variety of inputs the children have programmed the Microbits to complete quite a variety of functions, including: to play music, to count steps, and to play the game rock, paper, scissors.
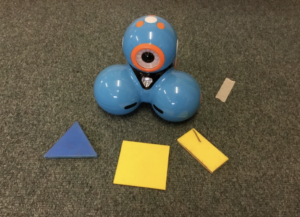
3. Max the robot is quite different. The coding inside Max is so complex that we’re not focusing on his programming as such, but rather using his interface to train him to do different jobs. We started by learning how to control him carefully in real time. He uses a playstation 4 controller and is very instinctive to use. The children have all had a chance to control Max in real time in order to get used to his controls.

-

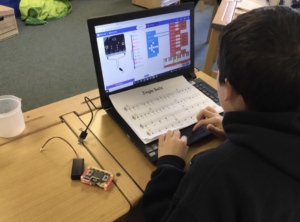
- We train Max by watching the screen, not the robot itself.

-

- This is what we can see. The blue line shows where Max thinks he should go next!
Now we have progressed to training Max more carefully with the target of him driving on his own. For training Max to do this type of job, we don’t look at him directly as it becomes tempting to control him like a remote control car. We only use the information that he can see himself, this means controlling him by looking at the computer screen rather than the robot itself. This takes a bit of getting used to, see pictures above.
The children achieved success using this method just before Christmas, training him to drive around the school hall on his own (see video below). This was a real achievement and gives us confidence for pushing on and being a bit more adventurous.
Our next big step for the weeks ahead is to train Max to head to the shop. He is already quite comfortable following the grass verge, so the signs are looking good, see video 2.
